|
|
|
|
|
|
|
| 1.Body Sensor Network |
|
1) Body Sensor Network based Human Activity Recognition
Body sensor network (BSN) may be applied in the human body monitoring. Signals of human activity such as acceleration signal, angular velocity signal and force feedback signal and so on can be acquired and recorded by BSN. After preprocessing the signals by adopting various methods such as FFT method, signal features can be extracted. The method of artificial intelligence will then be utilized for human activity recognition (such as human daily activity recognition, abnormal activity detection, etc.). A BSN platform has the advantages of low power, low cost, small size and high processing capacity without being limited by the surrounding environment. It also overcomes some drawbacks (such as regional fixed, difficultly exacted motion parameters, the invasion of privacy, etc.) of traditional human action recognition based on images. BSN may be widely applied in many fields such as medical, health care, sports, military and entertainment.

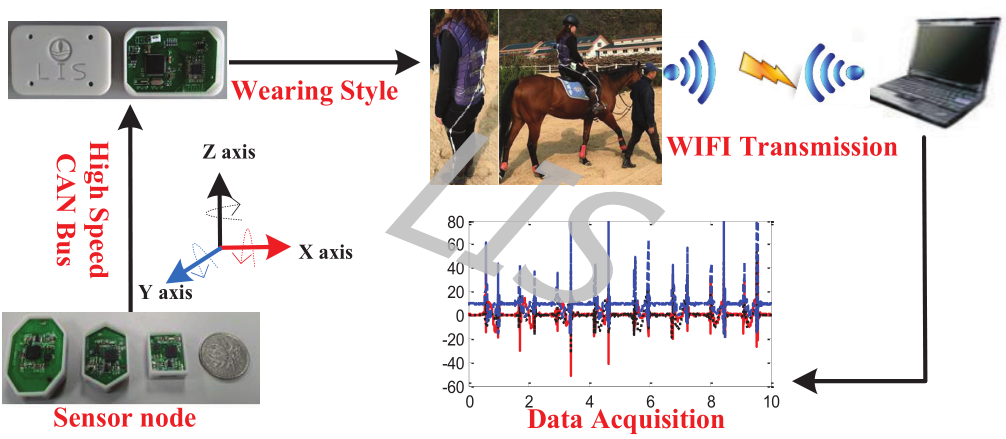
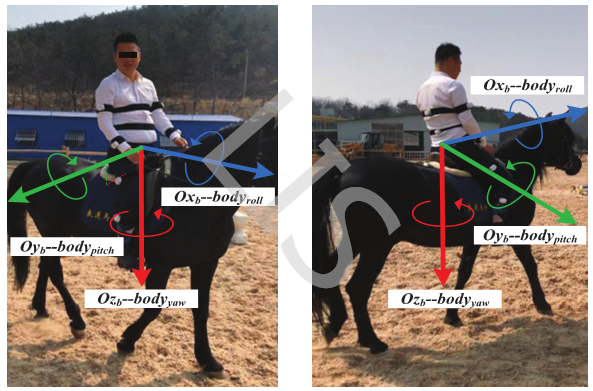
2) Analysis and evaluation of equestrian treatment based on somatic domain sensor network
Hippotherapy, also known as Therapeutic Horse Riding, has been reported to be effective in the rehabilitation of patients with cerebral palsy in recent years. The equestrian Therapy Association of the United States defines hippotherapy as: it is a form of physical, occupational and speech therapy in which a therapist uses the characteristic movements of a horse to provide carefully graded motor and sensory input. A foundation is established to improve neurological function and sensory processing, which can be generalized to a wide range of daily activities. Unlike therapeutic horseback riding (where specific riding skills are taught), the movement of the horse is a means to a treatment goal when utilizing hippotherapy as a treatment strategy. Hippotherapy has been used to treat patients with neurological or other disabilities, such as autism, cerebral palsy, arthritis, multiple sclerosis, head injury, stroke, spinal cord injury, behavioral disorders and psychiatric disorders. However, as one kind of comprehensive treatment. hippotherapy not only improves motor function, but also affects psychological, cognitive, social, behavioral and communicative abilities. At present, the difficulty of data acquisition and shortcomings of valuation method restrict its further development.
In our research, with the help of body sensor network, the motion information of equestrian was collected by arranging inertial sensors on the surface of the rider and horse, and the kinematics analysis was carried out by data fusion method. At the same time, the rehabilitation of children with movement disorders before and after participating in hippotherapy was statistically analyzed to verify the effectiveness of hippotherapy.
|
| 2.The monitoring and recognition of human motion |
|
1) Pedestrian navigation methods and systems based on inertial measurement sensors
The low-cost, small-size and light-weight inertial measurement units (IMU), based on MEMS technology, has become an ideal choice for the pedestrian navigation systems (PNS). Based on the MEMS IMU, the PNS can be implemented as a foot-mounted zero-velocity-update (ZUPT)-aided inertial navigation system (INS), which has the ability to correct the navigation errors periodically by taking advantages of the inherent nature of human foot motions. During the navigation process, every gait cycle offers opportunity to implement the ZUPT algorithm to improve the navigation accuracy. The PNS can determine the real-time attitude, velocity and position information of the pedestrian, so as to realize the purpose of pedestrian positioning, tracking and navigation.
In order to make full use of the periodic nature of human gait, the IMU is usually mounted on the user's foot to collect the walking data, which can be transmitted from the IMU to the navigation computer through the wire or wireless communication mode.
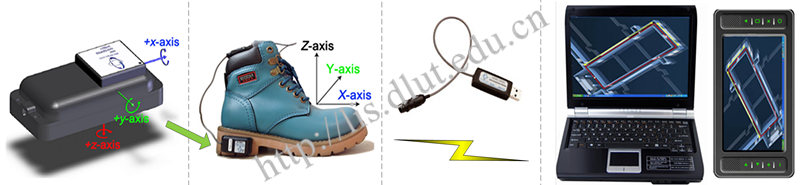
2) Three-dimensional gait analysis system
People's walking process contains a lot of kinesiology information. Gait analysis has very important significance in many fields such as sport rehabilitation medicine, bipedal robot control, and gait recognition domain. Traditional gait measurement obtains gait information by using visual and footprint methods with a stopwatch and metric scale, so errors caused by human factors are often large. In order to measure walking length, speed, frequency and phase during one walking processes more accurately, we developed a three-dimensional gait analysis system by using inertial measurement unit. The system directly measures the acceleration and angular velocity of human limbs and feet in the walking process, and transmits to a computing unit wirelessly. After a signal preprocessing including digitals filtering, thresholds detection and sensors data fusion, the computing unit may work out three-dimensional gait parameters.
 
|
| 3.Intelligent wearable system |
|
Wireless intelligent helmets for rescue personnel
A wireless intelligent helmet for rescue personnel developed by LIS consists of helmet terminal, relay and on-site rescue command center system. The helmet terminal is equipped with audio and video units, GPS, poison gas sensors and wireless transmitter, and so on. The main board of the helmet runs Linux system and OLSR routing protocol. In the case of damage of infrastructure network, the intelligent rescue helmet may transmit real-time information of disaster scene to the rear command center through wireless ad hoc network. It also provides the real-time audio and video communication between all helmet terminals and the rear command center, and also audio communication among all helmet terminals. The system may free hands of rescue personnel and increases efficiency of rescue work.
 
 
|
| 4.Bio-inspired Robot |
|
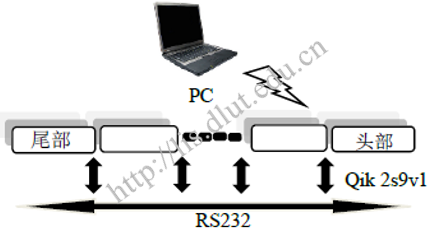
The snake-like robot
Snake robots play a crucial role in search and rescue operations where it may either be too narrow or too dangerous for personnel to operate. The distributed joints of snake robots can produce uniform and relatively small pressure when moving close to the ground, which make them suitable for achieving search or rescue work in easily collapsed buildings where wheeled and legged robots become stuck easily.
Our work in this field includes mechanical design, control system of the snake robot and its motion planning. The snake robot designed by our lab has a connection of eleven rigid links and ten joints with two degrees of freedom. Two motors are situated in each link and one motor is responsible for one degree of freedom. The universal joints make it possible for the snake robot to adapt complex environment by means of different gait patterns such as serpentine locomotion or three-dimensional sindwinding locomotion. A motor driver and a microcontroller board are mounted in each link of the robot. An operator can sends commands from a control computer to control modules distributed in the joints. The motor drivers receive joint commands from the microcontrollers and generate pulse width modulation voltage signals for the motors which drive the corresponding joints to rotate. Small passive castors are mounted around the body of links in order to imitate the directional friction by generating larger friction forces in the normal direction than in the tangential direction. A biologically inspired CPG strategy based on coupled Hopf oscillators is adopted for the snake robot.
 
|
|
| | |
| | |

