|
1、基于微惯性传感器的行人导航方法和系统
基于MEMS技术的惯性传感器(Inertial Measurement Unit,IMU)具有体积小、质量轻、成本低等优点,成为穿戴式行人导航系统的理想选择。基于MEMS IMU的行人导航系统是在传统捷联式惯性导航系统的基础上,利用人体行走时足部运动的周期特性,通过零速校正算法,实现行人导航的误差校正。行人导航系统主要用于确定行人的实时方位、速度和位置,并记录行人的行走轨迹,实现行人定位和导航的功能。
为了充分利用人体行走时的周期特性,IMU传感器固联于行人的足部,用于采集人体的行走数据。便携式上位机对采集到的行走数据进行存储和处理,并可将行人的相关位置信息传输给现场或远程的监控中心,以使监控中心能够监测行人的位置变化情况。IMU传感器与上位机之间可以通过有线和无线的通信方式进行数据传输。
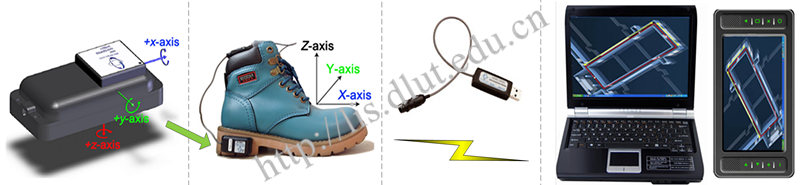
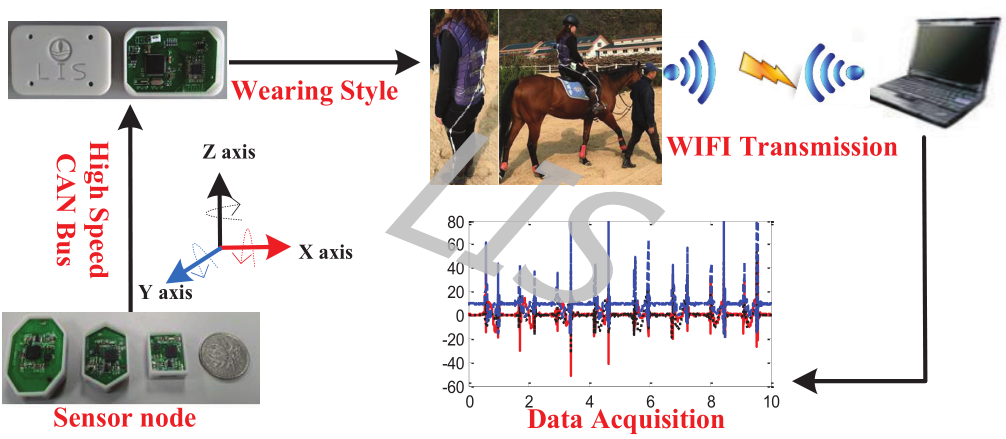
2、三维步态分析系统
人的步行过程包含大量的人体运动学信息。步态分析在很多领域例如运动康复医学、双足机器人控制和步态识别领域都有很重要的意义。传统的步态测量借助秒表和米尺使用目测方法以及足印法得到步态的信息,人为因素造成的误差非常大。为了更精确地测量人行走过程中的步长、步速、步频和步行时相划分,本研究使用惯性测量单元并结合无线传感器网络(ZigBee)设计实现了三维步态分析系统。该系统直接测量人在步行过程中下肢的加速度和角速度变化,通过无线网络传送到上位机。在上位机软件中,通过数字滤波、阈值检测、传感器数据融合得到被测者的三维步态参数,最后将结果存储在数据库并显示在上位机界面。
 
|